Neuromuscular mechanics
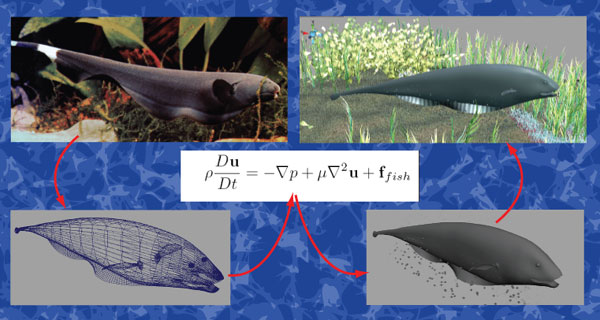
Prof. MacIver and our group are collaborating to develop a first-of-its-kind neuromechanical simulation of freely swimming weakly electric knifefish (see image below), a model system in neurobiology. These fish hunt at night in the muddy rivers of the Amazon basin using only a weak, self-generated electric field to perceive their world.
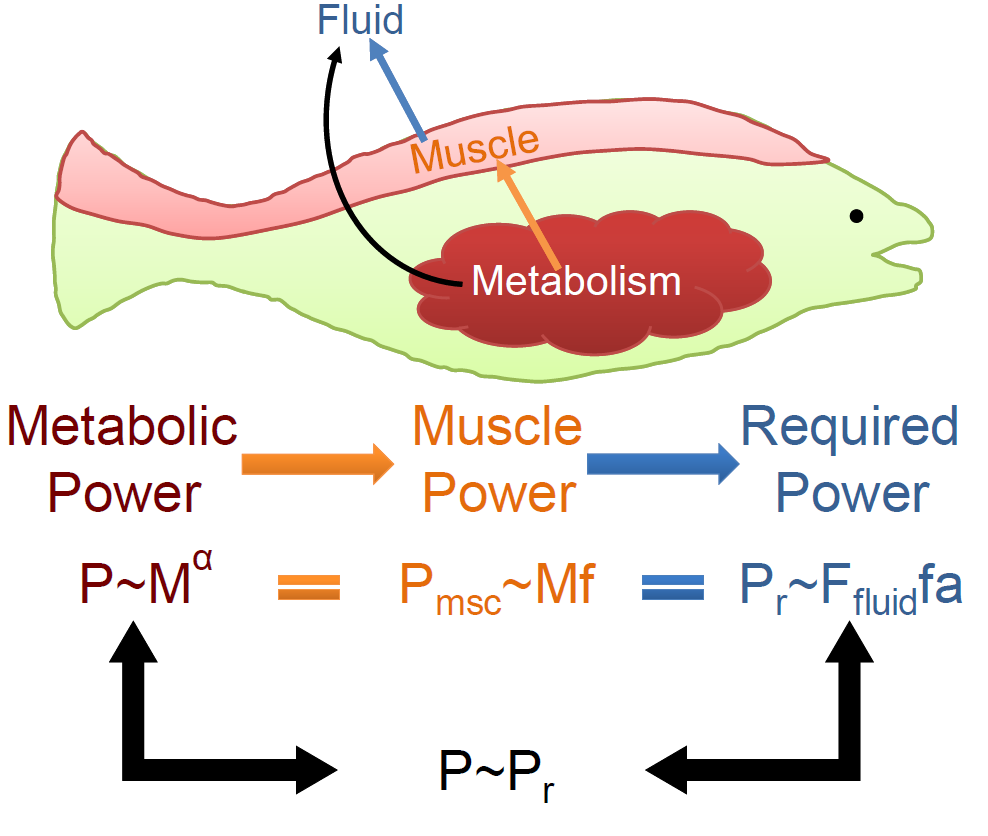
A complete neuromechanical model of the knifefish is being developed by coupling Professor MacIver's model of the fish's nervous system with our free swimming computational fluid dynamic model. Neuromechanical simulations can be used to understand the complex interactions between the neuronal, sensory, muscular and mechanical components of locomotor systems. Such simulations may provide new information on the functional role of specific groups of sensory receptors in regulating locomotion.